Internal Pipe Climbing Robot

This project was created as part of the Institute of Mechanical Engineers First Year Challenge, where I led a team to design and build a pipe-climbing robot in just two weeks.
I coordinated design, manufacturing, and testing efforts, managing task delegation and progress meetings.
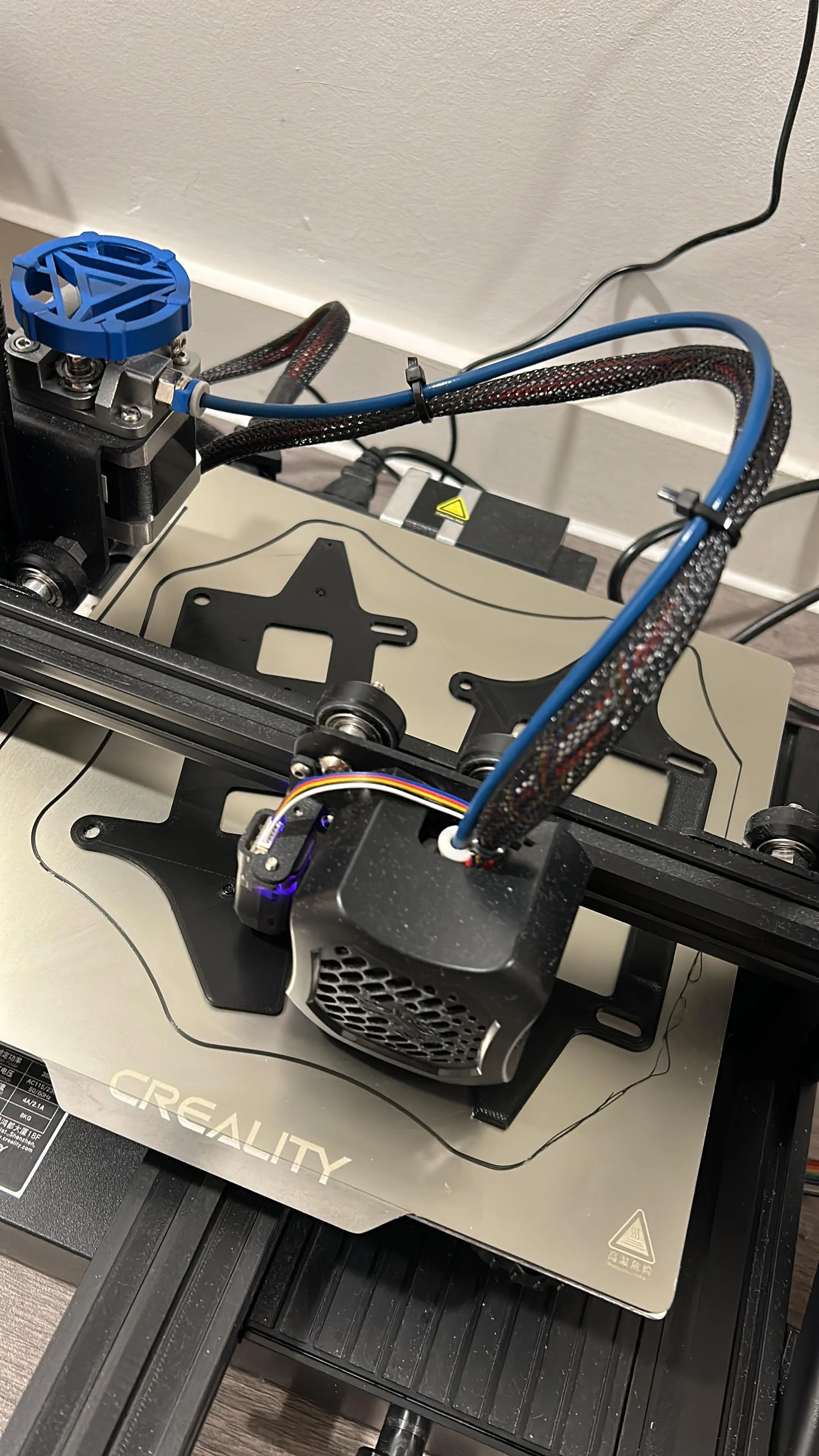
Using Autodesk Fusion and 3D printing to rapidly iterate through designs, we delivered a fully functional prototype ahead of schedule, earning 2nd runner-up in UCL’s internal competition.
3D Printing for Rapid Prototyping